Next: Infinite Impulse Response (IIR) Filters: Up: Digital Filtering Previous: Finite Impulse Response (FIR) Filters:
![$\displaystyle y[n] = x[n] + y[n - 1]
$](img27.png)
![$x[n] = \{ \ldots, 1, 1, 1, 1, \ldots \} \hspace{0.2in} (f = 0 \mbox{ or DC})$](img17.png)
![$x[n] = \{ \ldots, 1, -1, 1, -1, \ldots \} \hspace{0.2in} (f = f_s / 2)$](img18.png)
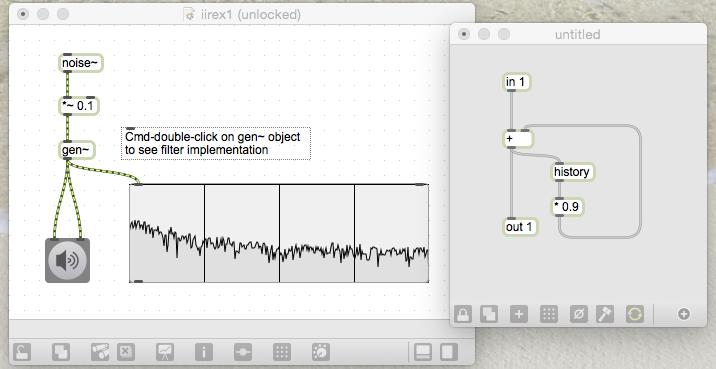
![$\displaystyle y[n] = x[n] + a_1 * y[n - 1]
$](img30.png)
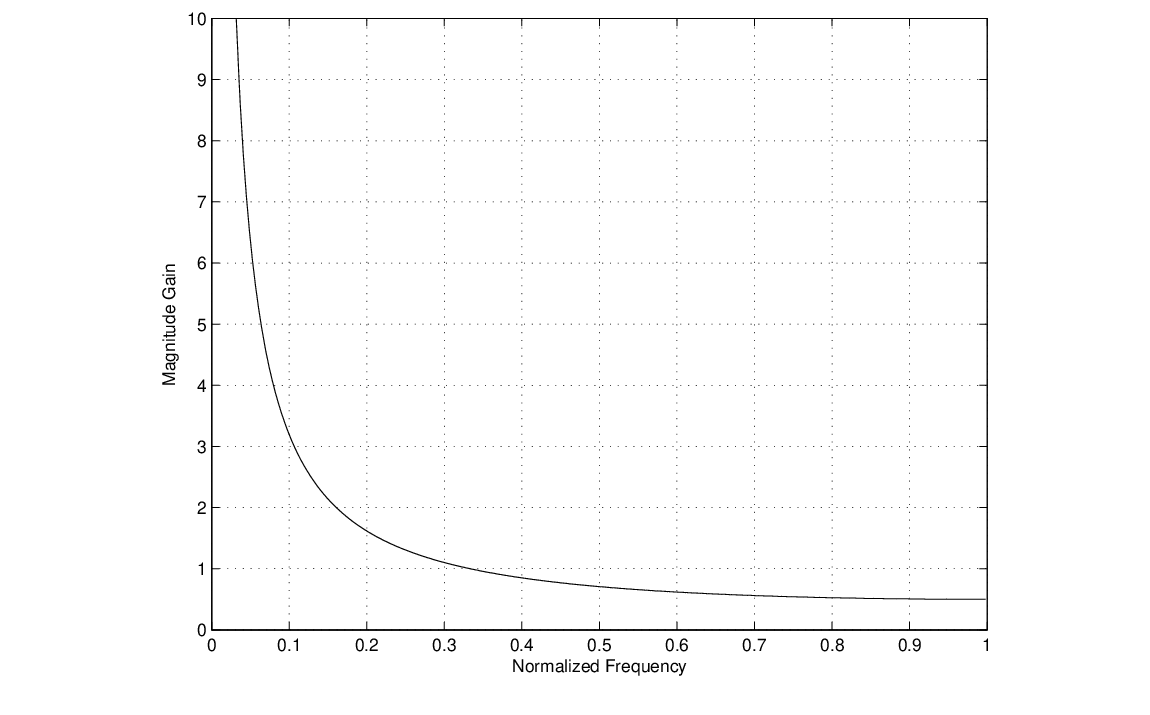
 , is shown in Fig. 7.
, is shown in Fig. 7.
 .
.
double lastOutput = 0;
double Filter::tick( double input )
{
return lastOutput = input + a1 * lastOutput; // do filter calculation
}

| ©2004-2024 McGill University. All Rights Reserved. Maintained by Gary P. Scavone. |
![\begin{figure}\begin{center}
\begin{picture}(2.5,1.2)
\put(0.27,0.0){\epsfig{f...
...16){$z^{-1}$}
\put (2.42,0.93){$y[n]$}
\end{picture} \end{center}
\end{figure}](img28.png)
![\begin{figure}\begin{center}
\begin{picture}(2.5,1.0)
\put(0.27,0.0){\epsfig{f...
...6,0.26){$a_1$}
\put(2.42,0.79){$y[n]$}
\end{picture} \end{center}
\end{figure}](img31.png)
