As previously discussed, wave propagation along a string of finite length can be efficiently and accurately modeled with digital waveguide techniques.
The “nut” is assumed ideally rigid, resulting in a reflection coefficient of -1 for displacement or velocity wave components.
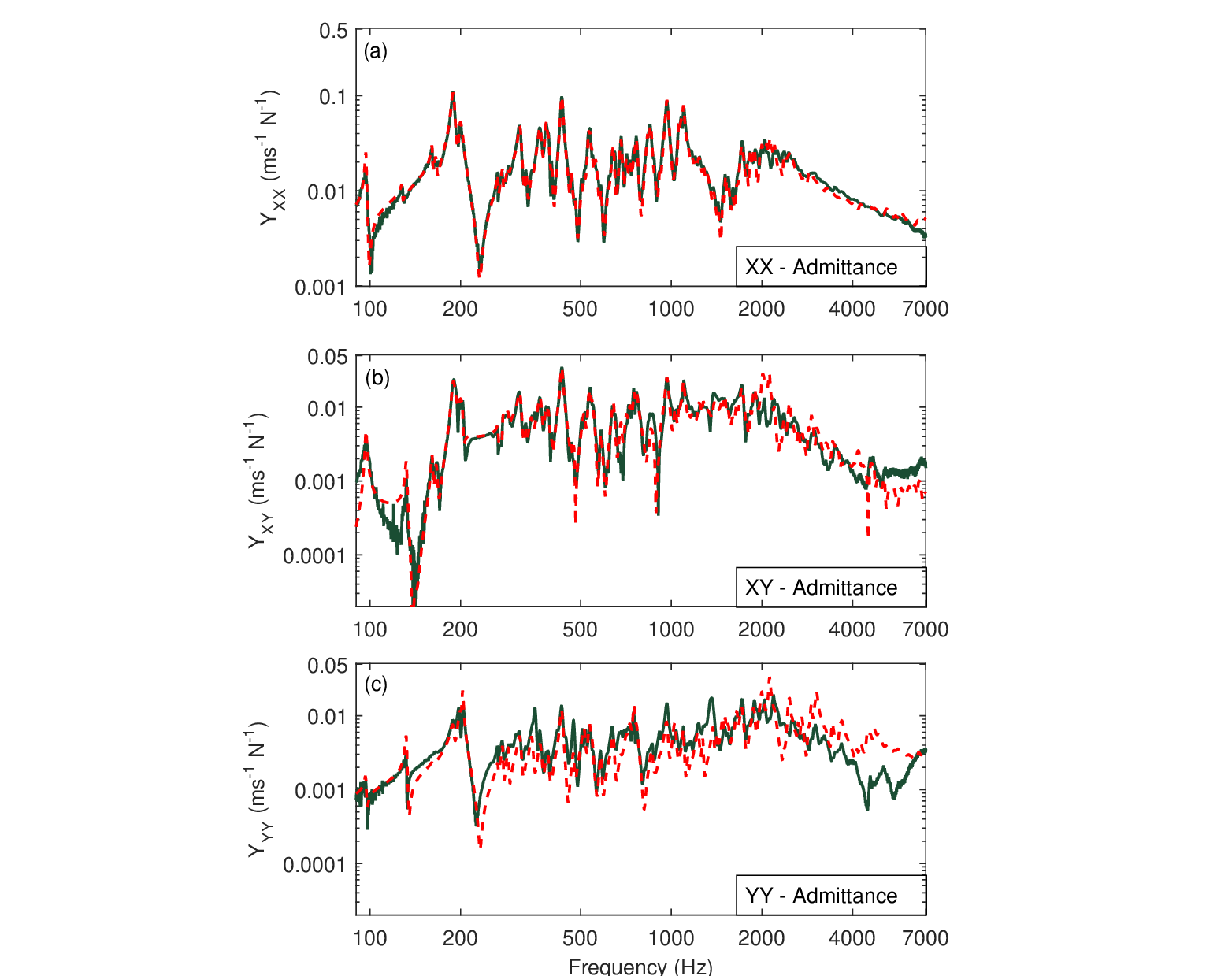
The bridge is assumed to have a finite impedance, so that some energy is transferred from the string to the instrument body.
Several recent studies (Maestre et al., 2015; Mansour et al., 2016b) have reported results of using two-dimensional measured bridge admittance and radiativity to derive accurate body filter designs for use in simulations.
Losses along the string cause the string energy to decay (in the absence of a driving mechanism). The losses can be commuted and implemented at discrete positions along the distributed string model.
When bowed, the string is effectively split into two sections, one on either side of the bow. Thus, damping filters must be derived for each of the two string sections. In Mansour et al. (2017,2016a,b), measurements of string damping were fit to a theoretical model reported by Valette (1995) (representing viscous effect of the surrounding air, viscoelasticity and thermoelasticity of the string material, and internal friction) and then used to design corresponding digital filters.
The effects of dispersion resulting from string stiffness are less audible in bowed string instruments because a driven system is forced to vibrate periodically. However, the natural inharmonicity of the strings will “color” the resulting harmonic sound spectrum, as well as have some influence on the bow-string interaction.
Note that such filters must be re-designed if the bow position changes, making the task of accurate, flexible and efficient modeling of bowed-string damping and dispersion extremely difficult.
A bowed-string model reported in Mansour et al. (2016a) included two transverse, as well as torsional, dimensions of wave propagation.