If measured data is to be used within a synthesis environment that includes a feedback loop (such as to characterize the body response of a violin), it is imperative that the resulting digital filter structure be designed in such a way as to guarantee passivity.
Measured responses tend to have some noise, so the filter design should allow smoothing or the ability to exclude certain parts of the response.
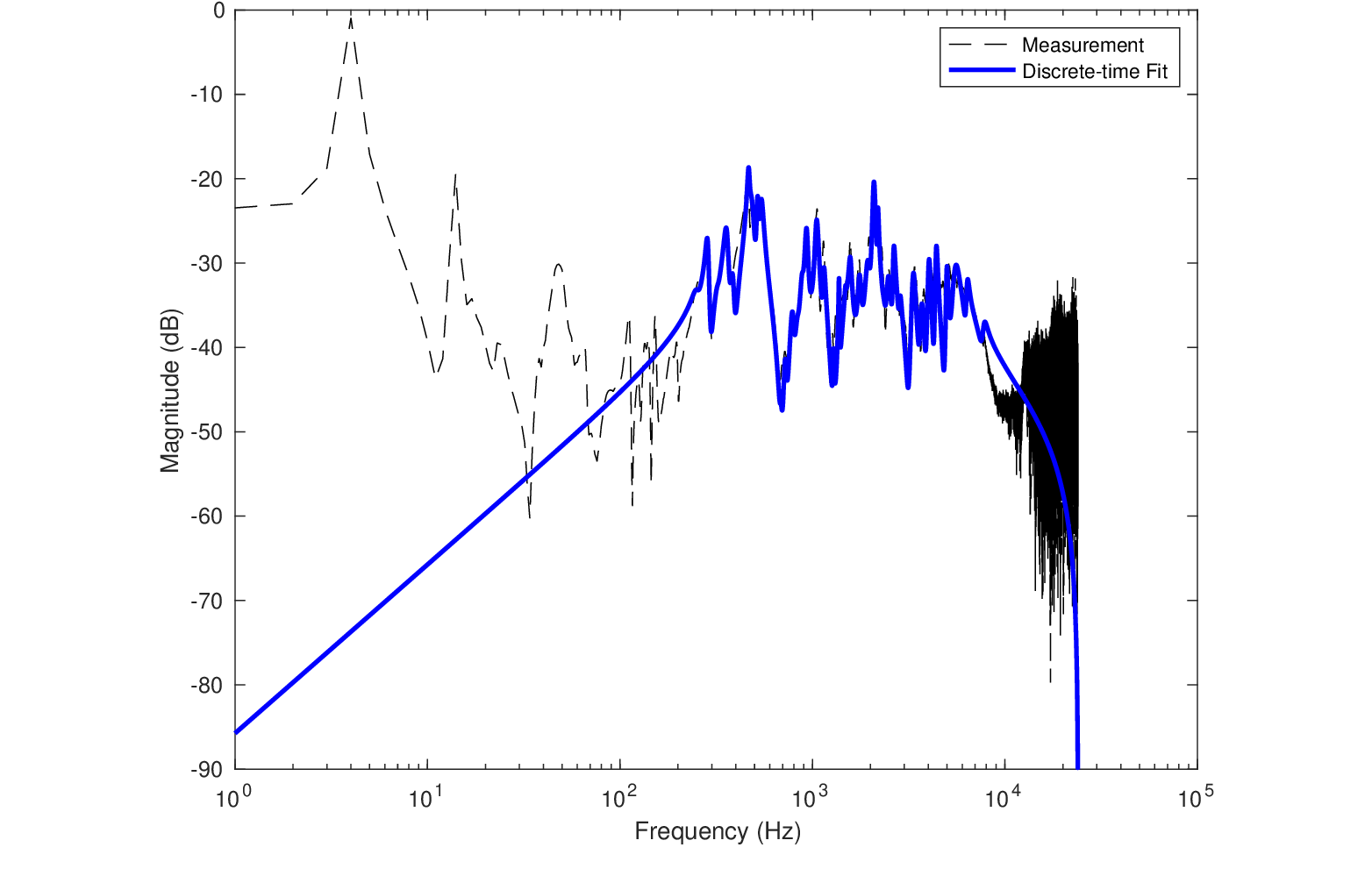
Figure 15:
A measured violin admittance and a discrete-time fit using a parallel bank of second-order filters.