Next: Discretization Methods: Up: Lumped System Analysis: Previous: Free Vibrations of Ideal Systems:
 ) of the system characterizes its steady-state response, after its initial transient behavior has decayed away.
) of the system characterizes its steady-state response, after its initial transient behavior has decayed away.


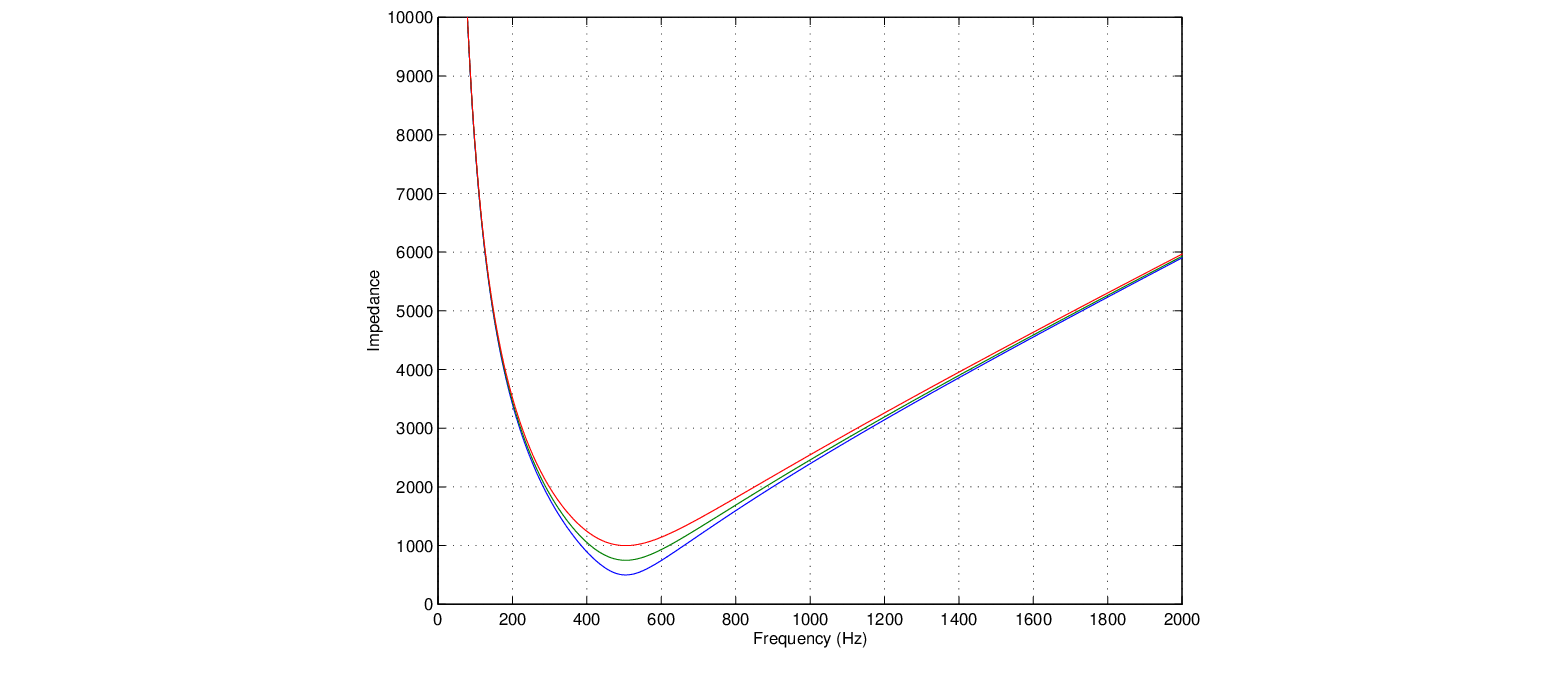
![$\displaystyle m \ddot{x} + \mu \dot{x} + k x = f(t) \hspace{0.1in} \Longleftrightarrow \hspace{0.1in} V(s) \left[m s + \mu + k/s \right] = F(s),
$](img46.png)
 , as shown in Fig. 10 for three different damping constants.
, as shown in Fig. 10 for three different damping constants.
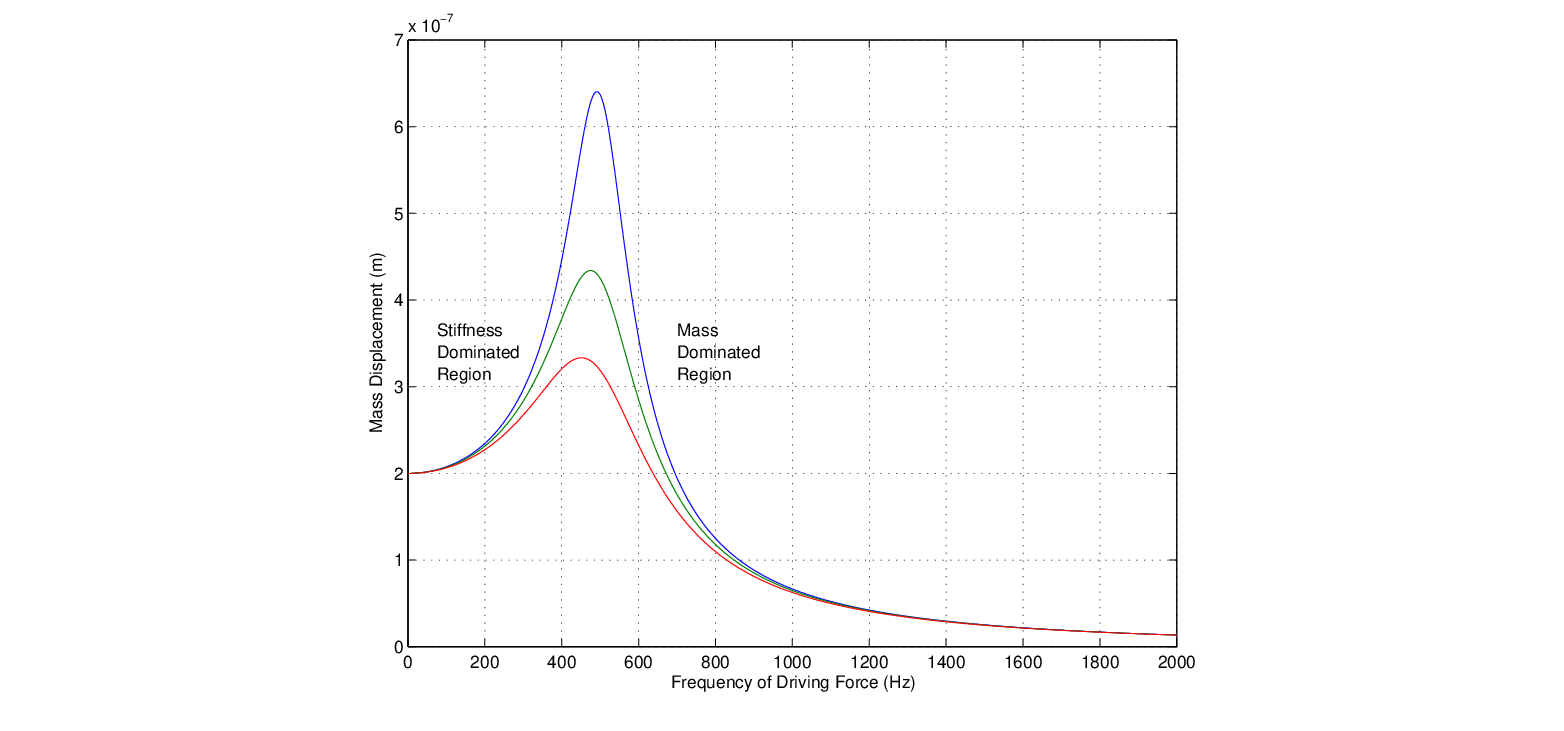
![$\displaystyle m \ddot{x} + \mu \dot{x} + k x = f(t) \hspace{0.1in} \Longleftrightarrow \hspace{0.1in} X(s) \left[m s^2 + \mu s + k \right] = F(s)
$](img49.png)


| ©2004-2024 McGill University. All Rights Reserved. Maintained by Gary P. Scavone. |